��β����(y��n)�C�o(w��)���{���܇(ch��)�ڸ��N��(ch��ng)�����ǰ�ȫ�ģ���̓�M�������愓(chu��ng)��̓�M�ij��С�̓�M�ĵ�·��̓�M����⡢̓�M����܇(ch��)��̓�M��܇(ch��)��̓�M�ij��������ܣ������[�������ٵ�������K������ȫ���Ԅ�(d��ng)�{�ϵ�y(t��ng)��
�����x�g���_(d��)��ϵ�y(t��ng)SCANeR�͑�Ҋ(ji��n)�C��Frederic Bourcier���_(d��)��ϵ�y(t��ng)CATIAِ��ϵ�y(t��ng)�F(tu��n)�(du��)���аl(f��)�����ú�SIMULIA�аl(f��)��(zh��n)��Ҏ(gu��)������Stephane Tessier�����v��
Frederic �I(y��)���ĵĴ֕r(sh��)�g������܇(ch��)�ИI(y��)���^(gu��)���ЙC(j��)��(hu��)��(sh��)�H�I(l��ng)��(d��o)���P(gu��n)�Ԅ�(d��ng)�{�ϵ�y(t��ng)�_(k��i)�l(f��)���ش��(xi��ng)Ŀ�ͽ�Q������Frederic��SCANeR�͑�Ҋ(ji��n)�C�ս�B���_(d��)��ϵ�y(t��ng)��ِ��ϵ�y(t��ng)��Cyber System�����������Ĺ�����������AVSimulation���_(d��)��ϵ�y(t��ng)֮�g�����ĺ�������P(gu��n)ϵ�ăr(ji��)ֵ��

�_(d��)��ϵ�y(t��ng)���ڞ�ِ��ϵ�y(t��ng)���_(k��i)�l(f��)�ṩһ����Q�������@��Q�������w��ϵ�y(t��ng)Ҏ(gu��)��������ģ�͵��O(sh��)Ӌ(j��)��֧�ָ����̌W(xu��)�Ƶĝu�M(j��n)ʽ���ɣ�����K���_(k��i)�l(f��)�Y(ji��)���r(sh��)ʹ���(y��n)�C��Q�����M(j��n)���(y��n)�C������(g��)�^(gu��)�̶���ه�ڿ�����������(l��i)�_���ИI(y��)�(qi��ng)����Ԅ�(d��ng)�{�ϵ�y(t��ng)�_(k��i)�l(f��)�õ��J(r��n)�C��
�_(d��)��ϵ�y(t��ng)֮�����ṩِ��ϵ�y(t��ng)�a(ch��n)Ʒ������?y��n)鿼�]����ͨ�ͳ������ڽ�(j��ng)�vǰ��δ�е��D(zhu��n)׃���ܵ���(j��ng)��(j��)�����(hu��)���ص��Ƅ�(d��ng)���@Щ������Ҫ���¶��x���_(k��i)�l(f��)����(li��n)��������������늚⻯��܇(ch��)�v.
܇(ch��)�v���O(sh��)Ӌ(j��)�ѽ�(j��ng)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)�D(zhu��n)��ϵ�y(t��ng)֮ϵ�y(t��ng)���O(sh��)Ӌ(j��)�����ṩԽ�ij����w�(y��n)��Ŀ��(bi��o)���ṩ��������(qi��ng)���Ԅ�(d��ng)�{��w�(y��n)?z��i)������@��(g��)Ŀ��(bi��o)���҂�?c��)������Ͽ�����������D�y������(zh��n)֮һ��

[�_(d��)��ϵ�y(t��ng)Ͷ�YADAS���Ԅ�(d��ng)�{�]
�@���Ǟ�ʲô�_(d��)��ϵ�y(t��ng)�Q��Ͷ�Y���cAVSimulation��˾������ԓ��˾���ڽ�Q�@Щ������(zh��n)���@Щ����(zh��n)���ڳɞ�ϵ�y(t��ng)֮ϵ�y(t��ng)����(w��)��һ���֡�
�@�ҹ�˾�Ĺ��߾���SCANeR�����ܺܶ��Ԅ�(d��ng)�{�Ĺ�˾�ѽ�(j��ng)�������@��(g��)���ߣ��_(d��)��ϵ�y(t��ng)Ӌ(j��)�������S�w�(y��n)ƽ�_(t��i)��Q������(du��)���M(j��n)�Ќ�(sh��)�H�a(b��)�䣬���ṩ��ȫ��(y��n)��Ĺ����_(k��i)�l(f��)��Q�������ƌW(xu��)�����Լ�̓�M���挍(sh��)�(y��n)�C�����ĽM�ϣ��@��ʹ�_(k��i)�l(f��)�ɱ��ɞ�ؓ(f��)��(d��n)����ijɱ���
��ʲô����?y��n)��_(k��i)�l(f��)�Ԅ�(d��ng)�{��Q�����Ĺ��̎������R���������(zh��n)֮һ�������Ԅ�(d��ng)�{�ϵ�y(t��ng)�ڬF(xi��n)��(sh��)�������\(y��n)�Еr(sh��)����Ҫ�C���Ԅ�(d��ng)�{�ϵ�y(t��ng)��ȫ�Ե�������
���������@һ�c(di��n)���܉����Ҏ(gu��)������������(g��)�_(k��i)�l(f��)�ɱ��Ŀ�ؓ(f��)��(d��n)�ԣ��҂��������������ʽ��(l��i)�M(j��n)��ϵ�y(t��ng)�(y��n)�C������Ҏ(gu��)ģ�������҂���회�(sh��)�F(xi��n)��Ŀ��(bi��o)֮һ�����҂����܉��C��ϵ�y(t��ng)�Ŀɿ��Ժ�ϵ�y(t��ng)�ķ�(w��n)���ԣ��Լ��_(d��)���@һĿ��(bi��o)���������̡�
��ˣ��_(d��)��ϵ�y(t��ng)�Įa(ch��n)Ʒ�M�Ϻ�CATIA SCANeR ���@�N�M�ό�(du��)�ڴ_����Ϣ��ȫ�����ܰ�ȫ���A(y��)�ڹ��ܰ�ȫ�ȶ���(g��)������_(k��i)�l(f��)���P(gu��n)��Ҫ��܇(ch��)�v���Ҫͨ�^(gu��)��(y��n)����J(r��n)�C��ͨ�^(gu��)�M(j��n)���@�N�M�ϣ��҂����܉�?y��n)��@��(g��)��������B(t��i)ϵ�y(t��ng)�ĸ���(g��)�������P(gu��n)���ṩ��(sh��)�F(xi��n)Ŀ��(bi��o)�Ŀ����ԡ�
[��SCANeR��������S�w�(y��n)�\��]
�ܶ˾�ѽ�(j��ng)��SCANeR���Ñ�����Ҷ�֪��SCANeR��ģ�MADAS���Ԅ�(d��ng)�{�ϵ�y(t��ng)��ͬ���ѽ�Q����֮һ��SCANeR ͨ�^(gu��)�ṩ̓�M�{�ܞ��ИI(y��)�ṩ���������p�����Ñ�(du��)�{��(y��n)�C������ͬ�r(sh��)�����ڌ�(sh��)�F(xi��n)���������㷨֮�g�IJ����_(k��i)�l(f��)���(d��ng)��
������Ч���M(j��n)���(y��n)�C���@���Ñ����J(r��n)�ɣ�ģ�M�h(hu��n)����회�(du��)���ֲܷ��ڶ���(g��)�������P(gu��n)��֮�g�Ķ��W(xu��)���_(k��i)�l(f��)�h(hu��n)���挍(sh��)չ�F(xi��n)������ԓ�h(hu��n)����(du��)���(xi��ng)Ŀ�ijɹ����P(gu��n)��Ҫ������횾��пɔU(ku��)չ�ԣ���Ҫ��Q�����(g��)��(gu��)�Һ͵����h(hu��n)�����T����(ch��ng)�����M�电(sh��)���f(w��n)Ӣ�����܉�չʾ�Ԅ�(d��ng)�{�䷀(w��n)���ԡ�
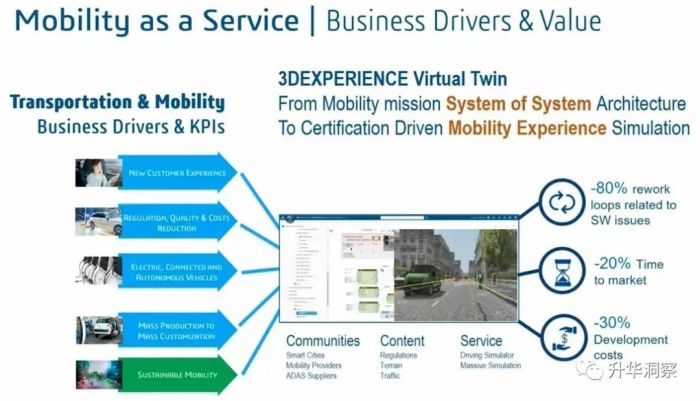
�c3DExperienceƽ�_(t��i)�ļ��ɣ����ɷ����w�(y��n)��(l��i)��������(g��)���棬��һ��ģ�͵�ȫ�������ڣ��Bͬ��(ch��ng)���ͽY(ji��)����ȫ�������ڣ��Լ��c�_(d��)��ϵ�y(t��ng)�a(ch��n)Ʒ�������P(gu��n)��ģ�M�h(hu��n)�������ã�һ�ж��cҎ(gu��)���Ŀ�����һ����ɡ�
�ڶ��Lj�(ch��ng)����(chu��ng)�����Ԅ�(d��ng)�����@�����ӽ����ԣ������U(ku��)չ?ji��)M���(bi��o)��(zh��n)�ͷ�Ҏ(gu��)��(bi��o)��(zh��n)����Ĝy(c��)ԇ��(k��)�����_(d��)�����w�����F(xi��n)���y(c��)ԇ��r����������Ҫ�M(j��n)һ������һϵ����r��
������(g��)��(sh��)�ǣ��҂����ṩһ�N������(l��i)����̓�M�ͬF(xi��n)��(sh��)�Ļ�ϣ����_(k��i)�l(f��)�����������ṩ�u�M(j��n)ʽ���ɣ��������Ñ�����(j��)�F(xi��n)��(sh��)�{�ĽY(ji��)����(l��i)����̓�Mģ�M��

[�r(ji��)ֵ����|�Ԅ�(d��ng)�{���B�m(x��)�_(k��i)�l(f��)�����ɡ��(y��n)�C�ͽ���]
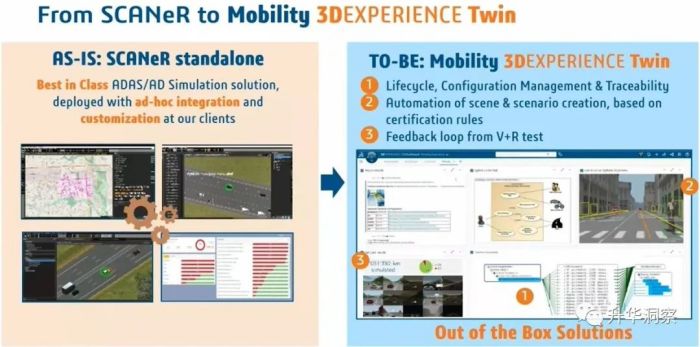
�F(xi��n)���҂��eһ��(g��)��(sh��)�H�����ӣ���(l��i)����CATIA SCANeR ������c�_(d��)��ϵ�y(t��ng)�����ಿ��һ��ʹ�õġ����ߵĽM���܉��ṩ�_(k��i)�l(f��)ȫ�������ڵ������B�m(x��)�ԡ�
�҂��ij����΄�(w��)��Ҏ(gu��)���_(k��i)ʼ��Ȼ��(chu��ng)����Ҫ���y(c��)ԇ���Ԅ�(d��ng)�{�ϵ�y(t��ng)��ԓϵ�y(t��ng)�����书�ܼܘ�(g��u)�_(k��i)ʼ��Ȼ��ͨ�^(gu��)һϵ�в��л��(d��ng)�M(j��n)��Ӌ(j��)�㣬�������xģ�͡��������Č�(sh��)�F(xi��n)���_(k��i)�l(f��)��܇(ch��)�v���O(sh��)Ӌ(j��)�������������@��(g��)�A���_(k��i)ʼ���҂���ʹ��CATIA SCANeR���Ա��܉�����̓�M��(ch��ng)������(g��u)���y(c��)ԇ����(du��)Ŀ��(bi��o)ϵ�y(t��ng)�M(j��n)�д�Ҏ(gu��)ģ��̓�M���棬��ͨ�^(gu��)�z���挍(sh��)�h(hu��n)���еĜy(c��)ԇ�c�A(y��)�ڽY(ji��)���Ƿ�ƥ�䣬��K�(y��n)�C���B�ӵ��F(xi��n)��(sh��)��؞���߂�����Ե�����(g��)�������ڣ����C��ϵ�y(t��ng)�İ�ȫ�ԡ���ȫ����������Ҫ��ĺ�Ҏ(gu��)�ԣ������c܇(ch��)�v�Č�(sh��)�H��Ҏ(gu��)��ѭ��ͬ�r(sh��)�������_(k��i)�l(f��)ѭ�h(hu��n)��������ģ�M�ͅf(xi��)����ͬ�ṩ��һ��Q�������@Щ��Q��������ÿλ���̎��ṩ���c�@һ�ó������������
���_(d��)��ϵ�y(t��ng)�_(k��i)�l(f��)���ИI(y��)����һֱ�������@��(g��)�_(k��i)�l(f��)���������܉��ṩ�ij����w�(y��n)���������_(k��i)�l(f��)��ÿ��(g��)�A�ζ��������ض��Ľ�ɫ��(l��i)푑�(y��ng)����

[�r(ji��)ֵ����| 1.���x�����΄�(w��)]
���̎��Ķ��x�����΄�(w��)��Ҏ(gu��)���_(k��i)ʼ���@Щ�����Ԃ��y(t��ng)��ʽ�M(j��n)�о�����Ҳ���Ԍ�(d��o)����ʽҎ(gu��)�����@�����ڷ�������ľ��w���x���Z(y��)�x�ԙz���Ƿ������в�һ�µ���r������߀�܉��һ�_(k��i)ʼ�͆���(d��ng)ģ�M���(y��n)�C���Ԅ�(d��ng)�{���܇(ch��)���x�IJ����O(sh��)Ӌ(j��)�����_���x��
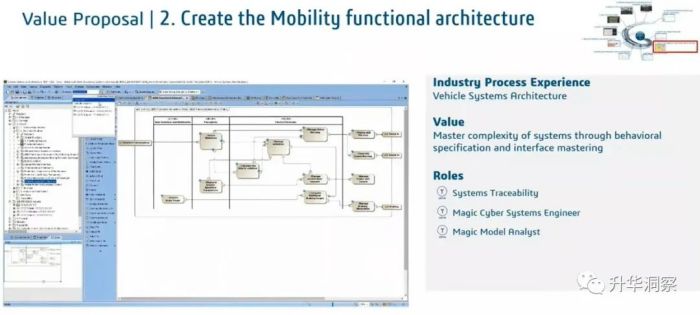
[�r(ji��)ֵ����| 2. ��(chu��ng)�����й��ܼܘ�(g��u)]
�ڶ������Ԅ�(d��ng)�{�ϵ�y(t��ng)�O(sh��)Ӌ(j��)��ԓϵ�y(t��ng)�O(sh��)Ӌ(j��)����ȫ�ڿ����Թ������M(j��n)�У��Դ_���ܘ�(g��u)�O(sh��)Ӌ(j��)��������NԪ�،�(sh��)�H���c�y(c��)ԇ���(y��n)�CӋ(j��)����ƥ�䡣
�@����ه��ʹ��sysML �Z(y��)���c��һ�N��Q����CATIA Magic һ�����飬ͨ�^(gu��)ԓ�����ṩ��ģ�M�����M(j��n)�е�һ��(j��)�(y��n)�C��

[�r(ji��)ֵ����| 3.���x܇(ch��)�v��(ch��ng)��ģ��]
�ڴ�֮ǰ�����˽����܉�y(c��)ԇ����������������Ĉ�(ch��ng)��ģ�ͣ��҂���ه���c3DEXPERIENCE ƽ�_(t��i)һ���ṩ�Ķ�N��ɫ������ϵ�y(t��ng)�����O(sh��)Ӌ(j��)����System Simulation Designer����ϵ�y(t��ng)�����������System Simulation Analyst�����@�ɂ�(g��)��ɫ�������\(y��n)�Ј�(ch��ng)�����M(j��n)���@Щ�(y��n)�C��

[�r(ji��)ֵ����| 4. ���x�͌�(sh��)�F(xi��n)܇(ch��)�v������]
��K�������Č�(sh��)�F(xi��n)������(j��)��܇(ch��)�Ę�(bi��o)��(zh��n)Ҏ(gu��)����(l��i)��ɣ���������AutoSAR�����m��(y��ng)��Q�������ṩ��ܛ����(j��)�eʹ��ħ��ܛ���ܘ�(g��u)����Magic Software Architect����ɫ��(l��i)���x�ܘ�(g��u)�������c�_(k��i)�l(f��)�����M(j��n)�о��g֮ǰ��ʹ��Ƕ��ʽܛ�����a(ch��n)�ߣ�Embedded Software Producer����ɫ��(l��i)���Cܛ�����팢�ڷ���h(hu��n)���п��á�

[�r(ji��)ֵ����| 5. ��̓�M܇(ch��)�v���÷ł�����]
�Y(ji��)��܇(ch��)�v�\(y��n)�Р�B(t��i)����܇(ch��)�������O(sh��)Ӌ(j��)�У���������λ�Ì�(du��)���Ԅ�(d��ng)�{�?c��)΄?w��)�ijɹ����P(gu��n)��Ҫ����?y��n)�ҕҰ������������ÿ��(g��)��ͬ�����Ă��������������(ch��ng)���r(sh��)�܉�?q��)����к�֪��Y(ji��)�ϣ���Ҫ�ṩ������������ԝM���΄�(w��)�İ�ȫҪ��
��ˣ���Ҫ�����O(sh��)Ӌ(j��)��܇(ch��)�ęC(j��)е���̎���ɫ���Լ����ڃ�(y��u)�����O(sh��)Ӌ(j��)Ҏ(gu��)�t��ģ�壬�Է��úͶ�λ���������Լ��˽����ͨ�^(gu��)CST �ṩ������늴�ģ�M��Ҳ�����f(shu��)�������_(d��)�������_(d��)�Ă������������������܇(ch��)�v��������һ�����M(j��n)��ģ�M�����̎����܉���Ɍ�(du��)ϵ�y(t��ng)���w���к�֪�����⡣�@Щ��ɫ�m���ڸ��N��͵Ă������������C(j��)���������_(d��)���ٵ�������������

[�r(ji��)ֵ����| 6. ���x��(ch��ng)��Ԫ�أ����Ρ���·��·��(bi��o)��������]
�Ǖr(sh��)���M(j��n)���Ԅ�(d��ng)�{�ϵ�y(t��ng)����h(hu��n)����ģ�M�ĕr(sh��)���ˣ�ϵ�y(t��ng)����ʾ���Ƿ��܉�M���҂����������ڭh(hu��n)���б��F(xi��n)���挍(sh��)�ĕr(sh��)�̣��҂��_��(sh��)��ه��3DEXPERIENCE ƽ�_(t��i)�Ĺ��ܣ�ʹAVSimulations ��CATIA SCANeR �f(xi��)ͬ�������{��w�(y��n)���̎���Driving Experience Engineer�����ɞ��܉�ͨ�^(gu��)���ȶ��x��(ch��ng)��Ԫ��(l��i)�ṩ�@�N�w�(y��n)�Ć�Ԫ���������Ρ���·����·��(bi��o)־�ͽ�������ه��ϵ�y(t��ng)�еĬF(xi��n)�Ɉ�(ch��ng)����Ҳ�܉�U(ku��)չ���������dȤ���κ���͵Ĉ�(ch��ng)���h(hu��n)��������(j��)�Ñ�����회�(sh��)�F(xi��n)��Ŀ��(bi��o)��(l��i)�C���Ԅ�(d��ng)�{�ϵ�y(t��ng)�İ�ȫ�ԡ�
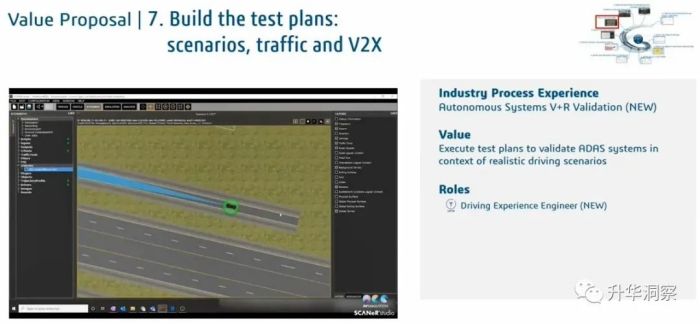
[�r(ji��)ֵ����| 7. ��(g��u)���y(c��)ԇӋ(j��)������(ch��ng)������ͨ��V2X]
��һ�����ǘ�(g��u)���y(c��)ԇӋ(j��)���������c�h(hu��n)����V2X �����Ŀ����ԣ��Լ�һ���{��w�(y��n)���܉�����@Щ��(ch��ng)���Խ�Q����(f��)�s�Ĺ��ܡ��U(ku��)չ��ϵ�y(t��ng)֮ϵ�y(t��ng)���y(c��)ԇ܇(ch��)�v�c�h(hu��n)��֮�g���P(gu��n)ϵ����ˣ��҂���هCATIA SCANeR�������܉�?y��n)��Ñ��ṩ�@�N�w�(y��n)���\(y��n)���@�N��(ch��ng)����
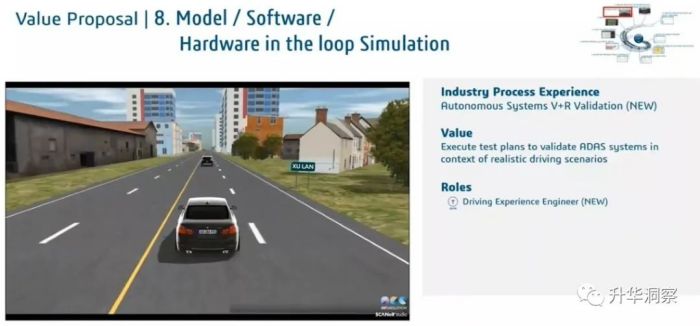
[�r(ji��)ֵ����|8. ģ���ڭh(hu��n)/ ܛ���ڭh(hu��n)/ Ӳ���ڭh(hu��n)����]
����S��CATIA SCANeR ������Ƴ���ģ�M���\(y��n)��Ӳ���ڭh(hu��n)����ĕr(sh��)�̵���(l��i)�ˣ�ƽ�_(t��i)�еķ��挢��(zh��)�Мy(c��)ԇӋ(j��)���������������{��(ch��ng)���ı������(y��n)�CADAS ϵ�y(t��ng)֮ǰ���O(sh��)�á�
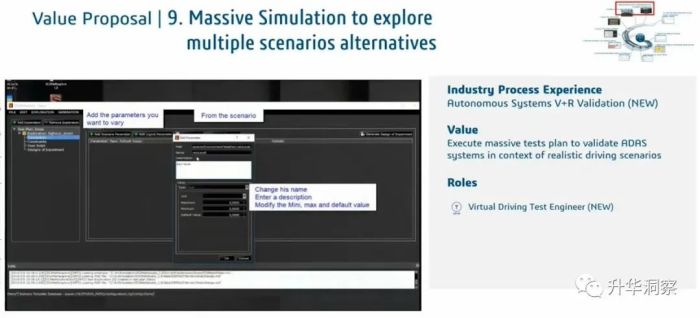
[�r(ji��)ֵ����|9.��Ҏ(gu��)ģģ�M̽����N��(ch��ng)���������]
�����C���Ԅ�(d��ng)�{ȫ�Եĕr(sh��)��Ҫ���]�Ĉ�(ch��ng)�������ڴˣ�߀��Ҫ���]ؓ(f��)�d���������������ܺ�����ģ�M���װ��f(w��n)�ε�������(l��i)�C���Ԅ�(d��ng)�{(j��)�e����İ�ȫ�_���ԡ�̓�M�{�y(c��)ԇ���̎���Virtual Driving Test Engineer����ɫ�������h���ڽ�Q��Ҏ(gu��)ģģ�M��(w��n)�}����̽���܉��C����ȫ�ԵĶ�N��(ch��ng)�����������
�����ѽ�(j��ng)��B���_(k��i)�l(f��)�Ԅ�(d��ng)�{�ϵ�y(t��ng)�Ďׂ�(g��)���E�����O(sh��)Ӌ(j��)����(sh��)ʩ�����y(c��)ԇ�ij���͜y(c��)ԇ�Ĉ�(zh��)�У��҂����ИI(y��)�ṩ�ij��Z���ṩȫ����B�m(x��)�ԡ����@�N�B�m(x��)��ֻ�����҂��܉�?q��)��H�@ȡ��(sh��)�r(sh��)�\(y��n)�Д�(sh��)��(j��)��ʹ�Æ�һ��(sh��)��(l��i)Դ����(sh��)��(j��)�đ�(y��ng)�ó�����͵���(y��ng)�ó���r(sh��)����Ч�����@�����҂��_(k��i)�l(f��)�ͼ���CATIA SCANeR �c3DEXPERIENCE ƽ�_(t��i)�ķ�ʽ�����(hu��)�������ҕ�l�п������F(tu��n)�(du��)�ѽ�(j��ng)�܉���3DEXPERIENCEƽ�_(t��i)����������ʹ��CATIA SCANeR ���ɵĔ�(sh��)��(j��)����3DEXPERIENCE ƽ�_(t��i)���طŲ�֪̽��(sh��)�r(sh��)�\(y��n)�Д�(sh��)��(j��)��ÿ��(g��)���棬�ļ��ɵ�����(g��)���浽��(ch��ng)���ٵ��Y(ji��)������ʹ��ɹ�����������(l��i)Ո(q��ng)�^����CATIA SCANeR �c3DEXPERIENCEƽ�_(t��i)���ɵĶ�ҕ�l��ʾ��

ԓҕ�l��ʾ����CATIAϵ�y(t��ng)���̿��Ƙ�(g��u)��(Control Build)��(y��ng)�ó������������Ԅ�(d��ng)�o���Ƅ�(d��ng)ϵ�y(t��ng)��Ȼ��ͨ�^(gu��)�߂�ADAS�����SCANeR Studio�M(j��n)�з��棬�������S�w�(y��n)ƽ�_(t��i)�ϻطŷ���Y(ji��)����CATIA ϵ�y(t��ng)���Ƙ�(g��u)����(y��ng)�ó������S��(g��u)�����O(sh��)Ӌ(j��)�@��(g��)�ɲ�ͬ�M����(g��u)�ɵľo���Ƅ�(d��ng)ϵ�y(t��ng)�����ڸ�֪���Q�ߺ��(q��)��(d��ng)��
�@��(g��)ϵ�y(t��ng)�҂����ԏ��Йz��ݔ���ݔ��׃������������(li��n)�Ϸ����FMU������ģ�͆�Ԫ����(d��o)����
�F(xi��n)��FMU �ļ��Ѵ��_(k��i)��SCANeR studio�������ԙz����������FMU ݔ���ݔ���Լ��cSCANeR Դ֮�g��ӳ�䡣��SCANeR studio �д��_(k��i)���dȤ�Ĉ�(ch��ng)���r(sh��)���҂�ֻ�茢�@��(g��)FMU ���ӵ���(ch��ng)���м��ɡ��˰汾�ќ�(zh��n)����\(y��n)�С���һ�v܇(ch��)��ǰ�����ڵڶ���(g��)λ����һ��(g��)Ƥ�����҂���������һ�v���R���鱻�y(c��)܇(ch��)�v����һ�v�ֱ���ͣ܇(ch��)���ڶ�λ�õ�Ƥ��܇(ch��)��(hu��)ͻȻ׃����Ȼ�y(c��)܇(ch��)�v�l(f��)�F(xi��n)ͣ�µĵ�һ�v܇(ch��)����SCANeR �з����@�N��r�ĽY(ji��)�������@�N��r�£��y(c��)ԇʧ�����l(f��)������ײ�����˱���͙z��Y(ji��)���M(j��n)�з�����SCANeR �Ñ��Q���B�ӵ�3DExperience ƽ�_(t��i)����һ����Ҫ����~̖(h��o)��Ϣ��SCANeR ������(chu��ng)����(ch��ng)�������P(gu��n)�Y(ji��)���t���������S�w�(y��n)ƽ�_(t��i)�ϡ�
����һ��(g��)MSR�����(xi��ng)Ŀ��MSR��Model-Scenario-Result������ģ�͡���(ch��ng)�����Y(ji��)������(d��ng)�Ñ��F(xi��n)���L��(w��n)3D �x����r(sh��)��Ҳ���������S�w�(y��n)ƽ�_(t��i)�ϵ�Web �T(m��n)���r(sh��)�������������L��(w��n)SCANeR ģ�M�����B(t��i)���Լ�����3DEXPERIENCEƽ�_(t��i)�ϵ���Ϣ���Ա���ٲ鿴���p�Ʌf(xi��)�����F(xi��n)�ڿ�����Web 3D �鿴�����ط�SCANeR ģ�M�Y(ji��)�����@ʾ���dȤ��KPI���L��3D ��(d��ng)��(hu��)�������ж���(g��)�z��C(j��)�O(sh��)�ã����S���ط����g��ҕ�ǡ�
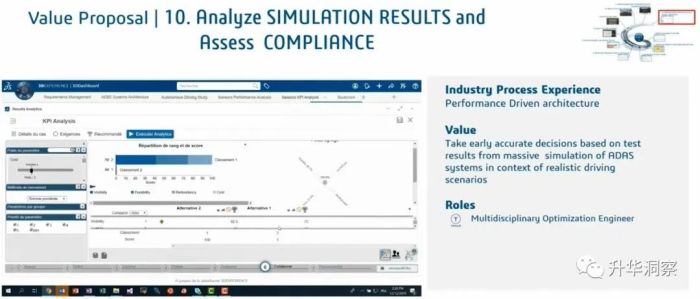
[�r(ji��)ֵ����| 10. ����ģ�M�Y(ji��)�����u(p��ng)����Ҏ(gu��)��]
����҂��r(ji��)ֵ�����ĵ�10 �������ص�3DExperience ƽ�_(t��i)����ԓƽ�_(t��i)�Ͽ��Է���ģ�M�Y(ji��)�����u(p��ng)����(du��)��(n��i)��Ŀ��(bi��o)��������r��
�F(xi��n)���õ��Ľ�ɫ�Ƕ��W(xu��)�ƃ�(y��u)�����̎���Multi Disciplinary Optimization Engineer�������Ĵ�Ҏ(gu��)ģģ�M���ռ��Y(ji��)�����������Ƅ�(d��ng)�������_����Щ����ш�(ch��ng)������Щ�������ڂ�������(y��u)������Щ�������ڌ�(sh��)�F(xi��n)�O(sh��)��Ŀ��(bi��o)�Ľ�ɫ�Ͳ������@���ṩ��3DEXPERIENCE ƽ�_(t��i)��CATIAِ��ϵ�y(t��ng)�M���Լ�AVSimulation CATIA SCANeR �ĽM�ϣ��҂������@��һ��(g��)�Ј�(ch��ng)�Ϫ�(d��)�صăr(ji��)ֵ������ͨ�^(gu��)�M�ρ�(l��i)�ṩ���б�Ҫ�IJ��E���Ա��܉��O(sh��)Ӌ(j��)���C���Ԅ�(d��ng)�{�ϵ�y(t��ng)�Լ��{�T�o��ϵ�y(t��ng)��������




 ����ͶӰ�C(j��)
����ͶӰ�C(j��) ��(ji��n)��ͶӰ�C(j��)
��(ji��n)��ͶӰ�C(j��) ��ҕͶӰ�C(j��)
��ҕͶӰ�C(j��) �O��ͶӰ�C(j��)
�O��ͶӰ�C(j��) SONNOCͶӰ�C(j��)
SONNOCͶӰ�C(j��) ��ҕ��(l��i)ͶӰ�C(j��)
��ҕ��(l��i)ͶӰ�C(j��) ҕ����(l��)ͶӰ�C(j��)
ҕ����(l��)ͶӰ�C(j��) ��(d��ng)ؐͶӰ�C(j��)
��(d��ng)ؐͶӰ�C(j��) ��ȤͶӰ�C(j��)
��ȤͶӰ�C(j��) WAP�֙C(j��)��
WAP�֙C(j��)�� ���h����
���h���� �ٷ���
�ٷ��� �Œ�һ��
�Œ�һ��