近年來,無人機群在監視、搜救、目標跟蹤、損傷評估等領域得到了廣泛的應用。無人機群由眾多小型無人機組成,有望提供高度合作和智能化的作戰。近十年來,人工智能的迅速發展為無人機群的智能協作提供了新的方法。然而,小型無人機有限的計算和存儲能力已經不能滿足資源密集型人工智能算法的要求。這成為制約無人機群智能化發展的瓶頸。
幸運的是,數字孿生(DT)作為用虛擬表示反映物理實體的關鍵技術之一,提供了最有前途的解決方案。在DT中,基于專家知識、物理模型、物理空間的歷史和實時傳感器數據,建立了高保真虛擬模型。網絡空間整合了物理空間的多維數據,并進行建模和分析。DT為網絡物理系統的構建提供了一種新的思路和實現途徑。它構建了網絡空間中物理實體的高保真數字孿生模型,并采用人工智能技術進行數據處理以獲得全局最優解。我們將重點回答以下問題:
Q1:如何以高保真的方式有效地反映虛擬空間中的物理實體?
Q2:如何充分利用DT在無人機群智能協同中的優勢?
Q3:如何為無人機群體設計合適的機器學習決策模型?
本文提出了一種基于DT的智能協作框架,以方便無人機群資源密集算法的實現。如圖1所示,無人機群用于不同任務,如森林防火、交通管制、人群監控等。在智能中心(IC)建立了一個數字雙模型,用于反映和監控物理實體(即無人機群)的整個生命周期。集成電路與高性能單元相結合,利用機器學習算法,在決策模型中探索了無人機群智能協作的全局最優解。

圖1 基于數字孿生的無人機群智能協作框架綜述
為了支持無人機群的智能協作,實時提供最優決策,提出了一種基于數字孿生的智能協作框架。無人機群的協同控制是一個復雜的問題,目標定位問題是NP難問題。機器學習算法可以提供高效的解決方案,但需要很高的計算和存儲能力。這些算法不能直接應用于小型無人機。在這項工作中,我們介紹了一種新的基于數字孿生的智能協作框架,如圖2所示。一般來說,框架由四部分組成:構成框架基礎的物理實體;監控物理空間的數字模型;做出智能合作決策的決策模型;以及連接所有部分的連接。這四個部分相互協作,實時提供最佳決策。
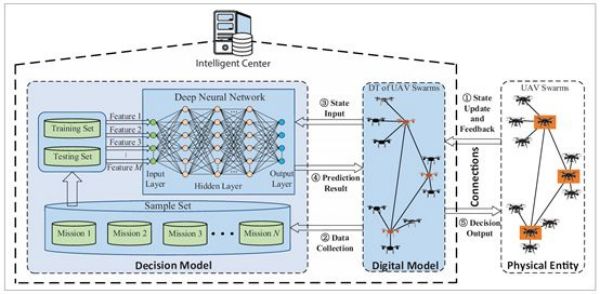
圖2 基于數字孿生的無人機群智能協同工作流程
如圖2所示,在決策模型中訓練深度神經網絡(DNN)以提供最優策略。無人機群在每一時刻的狀態都是由位置、速度、能量、探測概率等特征決定的。首先,數字模型從物理實體獲取環境狀態信息,通過仿真和建模生成不同任務的樣本數據集。在樣本數據集中有足夠的數據,我們訓練了DNN模型。一旦訓練,數字模型收集實時狀態信息并抽象當前狀態的特征。利用這些輸入,DNN進行最優預測并輸出到數字模型。接下來,數字模型分發最終決策以指導物理實體。最后,將不同時刻的狀態信息和環境反饋收集到樣本集進行進一步的訓練。
在空戰領域,時變環境對網絡性能提出了特殊的要求,如低延遲、低帶寬等。構建高度柔性作戰單元及其相應武器系統之間的自組織網絡具有重要意義。然而,受環境變化頻繁的影響,在執行不同的作戰任務時,固定的網絡模式很難甚至不可能支持協同數據傳輸。
我們為時變戰場提出了一種任務驅動型智能網絡重建平臺。該平臺將任務分為具有不同特征的幾種類型,并據此設計網絡模式。在數字模型中,根據任務要求和在各種環境條件下的仿真結果,構建經驗數據集。對于特定任務,可以使用機器學習算法獲得最佳網絡模式,包括介質訪問控制(MAC),資源分配,數據路由和拓撲控制策略。然后,將決策釋放到數據平面以用于物理實體的資源分配。執行戰斗任務后,將分析網絡性能并將其反饋給數字模型以更新樣本數據集。
該智能協同框架可廣泛應用于彈道設計、協同搜索、協同任務分配、協同編隊控制等領域。下面,我們將介紹一個最具代表性的應用程序,即圖3所示的協作搜索,以了解我們框架的好處。

圖3 基于數字孿生的無人機群智能協同搜索
為了提供覆蓋搜索區域的最優路徑規劃,協同搜索算法需要在無人機群中進行適當的在線資源分配。傳統的分布式協同搜索策略依賴于局部狀態信息,局部狀態信息具有魯棒性,但往往是局部最優的。此外,隨著無人機數量的增加,協同搜索的難度呈幾何級數增加。由于無人機的能量和計算量大,傳統的算法無法提供最優策略。基于數字孿生模型的智能協作框架有效地將資源密集型操作轉化為虛擬模型,為協作搜索提供了最優的解決方案。




 明基投影機
明基投影機 堅果投影機
堅果投影機 科視投影機
科視投影機 極米投影機
極米投影機 SONNOC投影機
SONNOC投影機 寶視來投影機
寶視來投影機 視美樂投影機
視美樂投影機 當貝投影機
當貝投影機 哈趣投影機
哈趣投影機 WAP手機版
WAP手機版 建議反饋
建議反饋 官方微博
官方微博 微信掃一掃
微信掃一掃